
µWebGen
- Maschinensteuerung über eine WebApp bzw. Webseite durch einfache Definitionsliste im uTasker Realtime Kernel.
- Eigenes WebInterface innerhalb von Minuten.
- Keine HTML oder JavaScript Kentnisse notwendig!
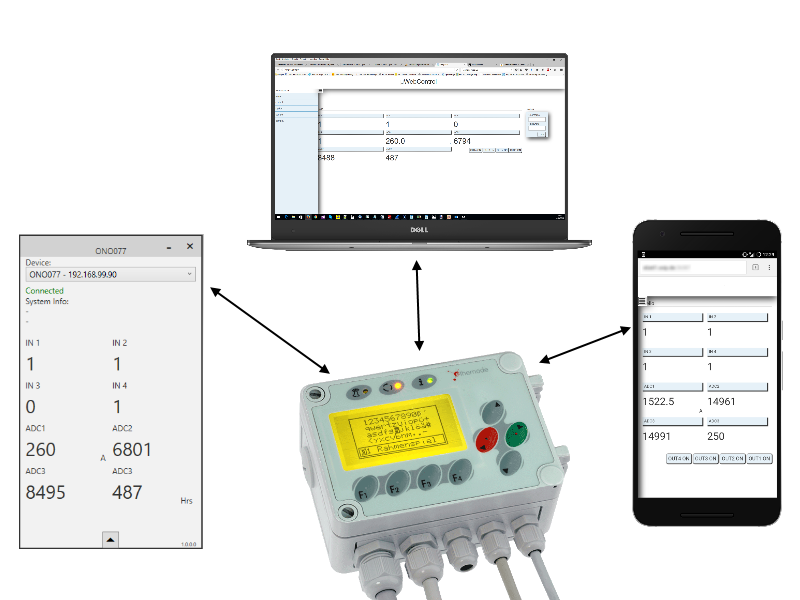
- Automatische Darstellung als Webseite auf dem PC und als WebApp-Oberfläche im Smartphone-Browser.
Benutzer erwarten heutzutage für jede Maschine oder Anlage eine Webseite zur Steuerung und Einrichtung.
Um diesen Prozess für Sie zu erleichtern können ELZET80-Steuerungen automatisch diese Webseite generieren.
Einfache Anweisungen im C-Code erstellen Anzeige- und Steuerelemente ohne Vorkenntnisse in HTML oder JavaScript!
Die Kommunikation zwischen Steuerung und Webseite erledigt vorgefertigter JavaScript-Code, der im Mikrocontroller eingebettet wird.
Wird von allen µTasker-Baugruppen und von Sonderlösungen mit Ethernet unterstützt.
- Funktion
- µTasker-Integration
- Beispiel: Slider
- Beispiel: Login
µWebGen bietet Ihnen einen Webinterface-Generator der Ihre Anlage spielend leicht über einen Webbrowser überwach- und oder steuerbar macht.
Der Aufbau der Webseite wird durch eine Art von Mark-Up Definitionen im C-Code beschrieben und durch vorgefertigte C-Funktionen verarbeitet.
Der daraus resultierende Code wird beim Aufruf der Webseite von eingebetteten JavaScript-Funktionen interpretiert und das Webinterface generiert.
Das besondere an dieser Strategie ist, das Sie über keinerlei Kenntnisse von Web-Technologien wie HTML und JavaScript verfügen müssen.
Standardsteuerelemente wie Buttons, Slider, und Comboboxen sind vorhanden und können ohne Mühe verwendet werden.
Webhandler einhängen:
µWebControl wird in den Webhandler von µTasker eingehangen (Datei: webinterface.c, Funktion: fnHandleWeb)
Als erste Abfrage in der Funtkion wird der folgende Code eingefügt:
if(ptrData[0] == '!'){// Check if the dynamic content page was requested return fnHandleDynamicQuery(ptrData, http_session);}
Im obigen Code wird überprüft ob eine HTTP-Anfrage mit einem vordefinierten Sonderzeichen (hier '!') beginnt.
Die Funktion fnHandleDynamicQuery ist die Hauptfunktion des µWebControl-Codes. Sie überprüft ob für die Anfrage eine Callback-Funtkion hinterlegt ist.
Callback registrieren:
In der Datei dynamicContent.c sind zwei Kommando-Arrays definiert. Das erste Array commands enthält Befehle die ohne Authentifizierung aufgerufen werden können, das zweite Array authCommands enhält Befehle die eine Authentifizierung erfordern.
/*command storage * CMD("commandString", callbackFunction) * callbackFunction has to be like this: * int callbackFunction(char * wrPtr, unsigned char message[], int * dynLen, char* query){} * */WEBCOMMAND commands[] = { CMD("login=",fnWebLogin), CMD("loginState",fnGetLoginState), CMD("gbv",fnGetWebVars), CMD("getPageDesc",fnGetPageDesc), CMD("curTm",fnGetCurrentTime), CMD("hdlVar=",fnWebHandler), CMD("clear",fnClearWebPars), CMD("btn",fnAddButton), CMD("getVals",fnGetValues),};
WEBCOMMAND authCommands[] = { CMD("setTime=",fnSetTime),};
Aufbau Callback-Funktion:
Die Callback-Funktionen müssen dem folgenden Funktionskopf enstsprechen:
int callbackFunction(char * wrPtr, unsigned char message[], int * dynLen, char* query);
wrPtr: buffer to hold the datamessage: The startaddress of wrPtr to calculate dynLendynLen: an integer pointer to store the length of the data to sendquery: The request query
Beispielfunktion fnGetIOStates:
The following function creates a page with the current states of the NET-3A4IO I/Os.
int fnGetIOState(char * wrPtr, unsigned char message[], int * dynLen, char* query){ long lTemp;
//first we display the three raw adc values
wrPtr = uStrcpy(wrPtr,"ADC1: "); wrPtr = fnBufferDec((fnGetADC3A4IO(0)),1,wrPtr);
wrPtr = uStrcpy(wrPtr,"<br>ADC2: "); wrPtr = fnBufferDec((fnGetADC3A4IO(1)),1,wrPtr);
wrPtr = uStrcpy(wrPtr,"<br>ADC3: "); wrPtr = fnBufferDec((fnGetADC3A4IO(2)),1,wrPtr);
//check if the 3A4IO is configured for PT100 or type K thermocouples and print it accordingly if(uc3A4IORange == RANGE_RTD_RAW){ wrPtr = uStrcpy(wrPtr,"<br> PT100(ADC1): "); wrPtr = fnBufferDec(fnLinVal(fnGetADC3A4IO(0),0),1,wrPtr); }else if(uc3A4IORange == RANGE_TC_RAW){ wrPtr = uStrcpy(wrPtr,"<br> Type K(ADC1): "); wrPtr = fnBufferDec(fnLinVal(fnGetADC3A4IO(0) + s3A4IO_ref_temp,1),1,wrPtr); }
//here we collect and print the states of the four outputs
wrPtr = uStrcpy(wrPtr,"<br> OUTPUT1: "); wrPtr = fnBufferDec(fnGetOutput3A4IO(0),0,wrPtr); wrPtr = uStrcpy(wrPtr,"<br> OUTPUT2: "); wrPtr = fnBufferDec(fnGetOutput3A4IO(1),0,wrPtr); wrPtr = uStrcpy(wrPtr,"<br> OUTPUT3: "); wrPtr = fnBufferDec(fnGetOutput3A4IO(2),0,wrPtr); wrPtr = uStrcpy(wrPtr,"<br> OUTPUT4: "); wrPtr = fnBufferDec(fnGetOutput3A4IO(3),0,wrPtr);
//here we collect and print the states of the four inputs
wrPtr = uStrcpy(wrPtr,"<br> Input1: "); wrPtr = fnBufferDec(fnGetInput3A4IO(0),0,wrPtr); wrPtr = uStrcpy(wrPtr,"<br> Input2: "); wrPtr = fnBufferDec(fnGetInput3A4IO(1),0,wrPtr); wrPtr = uStrcpy(wrPtr,"<br> Input3: "); wrPtr = fnBufferDec(fnGetInput3A4IO(2),0,wrPtr); wrPtr = uStrcpy(wrPtr,"<br> Input4: "); wrPtr = fnBufferDec(fnGetInput3A4IO(3),0,wrPtr);
//calculate the length of the generated content *dynLen = (wrPtr - (CHAR*) message); return 0;}
Das Ergebnis sieht so aus:
ADC2: 5125
ADC3: 12113
PT100(ADC1): 234
OUTPUT1: 0
OUTPUT2: 1
OUTPUT3: 0
OUTPUT4: 0
Input1: 1
Input2: 0
Input3: 1
Input4: 1
Coming soon...